




NEMA34 86 मिमी लीनियर हाइब्रिड स्टेपर मोटर, बाहरी ड्राइव, उच्च थ्रस्ट
विवरण
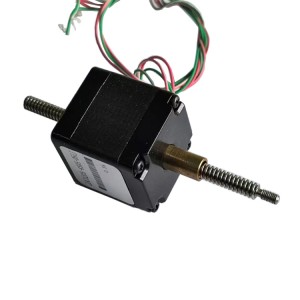
NEMA 34 हाइब्रिड स्टेपर मोटर का आकार 86 मिमी है।
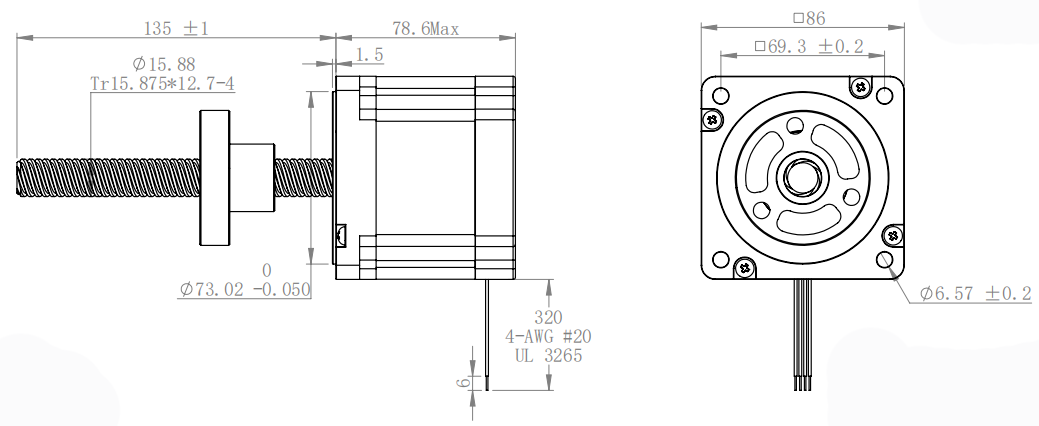
यह एक एक्सटर्नल ड्राइव लीनियर स्टेपर मोटर है जिसके ऊपर 135 मिमी लंबाई का लीड स्क्रू शाफ्ट लगा है, साथ ही इसमें प्लास्टिक का नट/स्लाइड भी फिट होता है।
लीड स्क्रू का मॉडल नंबर है: Tr15.875*P3.175*4N
लीड स्क्रू की पिच 3.17 मिमी है, और इसमें 4 स्टार्ट हैं, इसलिए लीड = स्टार्ट संख्या * लीड स्क्रू पिच = 4 * 3.175 मिमी = 12.7 मिमी
अतः मोटर की स्टेप लंबाई है: 12.7 मिमी / 200 स्टेप = 0.0635 मिमी / स्टेप
हमारे पास अन्य प्रकार के लीड स्क्रू विकल्प भी उपलब्ध हैं, यह मोटर के थ्रस्ट और लीनियर स्पीड के संबंध में ग्राहक की आवश्यकता पर निर्भर करता है।

पैरामीटर
| प्रतिरूप संख्या। | एसएम86सी0905 |
| मोटर व्यास | 86 मिमी (NEMA34) |
| ड्राइव वोल्टेज | 5वी डीसी |
| क्वायल प्रतिरोध | 1.6Ω±10%/चरण |
| चरण की संख्या | 2 चरण(द्विध्रुवी) |
| स्टेप कोण | 1.8°/कदम |
| वर्तमान दर | 3.12ए/चरण |
| न्यूनतम थ्रस्ट (300 पीपीएस) | 50 किलो |
| कदम की लंबाई | 0.0635 मिमी/चरण |
लीड स्क्रू पैरामीटर
| लीड स्क्रू प्रकार | समलम्बाकार पेंच |
| लीड स्क्रू मॉडल नंबर | Tr15.875*P3.175*4N |
| बहरी घेरा | 15.875 मिमी |
| नेतृत्व करना | 12.7 मिमी |
| प्रारंभ होगा | 4 |
| आवाज़ का उतार-चढ़ाव | 3.175 मिमी |
| कदम की लंबाई | 0.0635 मिमी/चरण |
डिज़ाइन आरेखण
लीड स्क्रू के बारे में
लीनियर हाइब्रिड स्टेपर मोटर में इस्तेमाल होने वाला लीड स्क्रू आम तौर पर ट्रेपेज़ॉइडल लीड स्क्रू होता है।
उदाहरण के लिए Tr3.5*P0.3*1N लीड स्क्रू के लिए।
Tr का अर्थ है समलम्बाकार लीड स्क्रू प्रकार
P0.3 का अर्थ है कि लीड स्क्रू की पिच 0.3 मिमी है।
1N का मतलब है कि यह सिंगल स्टार्ट लीड स्क्रू है।
लीड स्क्रू लीड = प्रारंभ संख्या * पिच
तो इस विशिष्ट लीड स्क्रू के लिए, लीड की मोटाई 0.3 मिमी है।
हाइब्रिड स्टेपर मोटर का स्टेपर कोण 1.8 डिग्री/स्टेप है, जिसे एक चक्कर लगाने में 200 स्टेप लगते हैं।
स्टेप लेंथ मोटर द्वारा की गई रैखिक गति है, जब वह एक कदम आगे बढ़ाती है।
0.3 मिमी लीड वाले स्क्रू के लिए, स्टेप की लंबाई 0.3 मिमी/200 स्टेप = 0.0015 मिमी/स्टेप होती है।
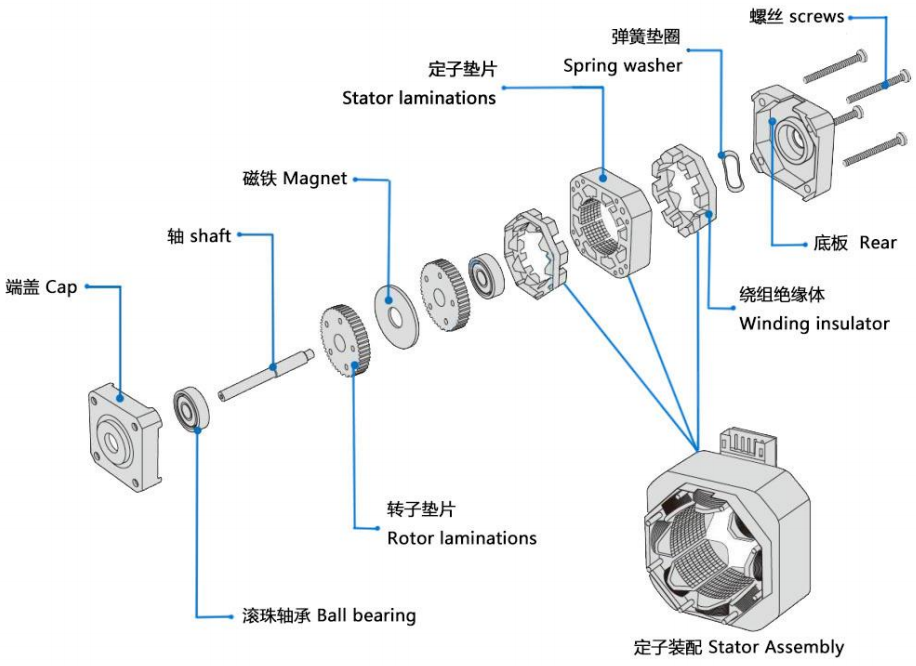
NEMA स्टेपर मोटर्स की मूल संरचना
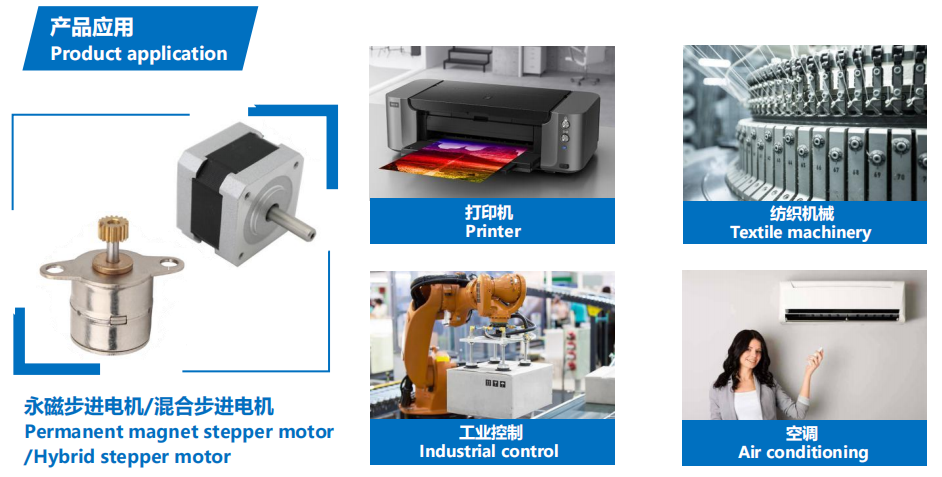
हाइब्रिड स्टेपर मोटर का अनुप्रयोग
हाइब्रिड स्टेपर मोटर की उच्च रिज़ॉल्यूशन (प्रति क्रांति 200 या 400 चरण) के कारण, इनका व्यापक रूप से उच्च परिशुद्धता की आवश्यकता वाले अनुप्रयोगों में उपयोग किया जाता है, जैसे कि:
3डी प्रिंटिंग
औद्योगिक नियंत्रण (सीएनसी, स्वचालित मिलिंग मशीन, कपड़ा मशीनरी)
कंप्यूटर सहायक उपकरण
पैकिंग मशीन
और अन्य स्वचालित प्रणालियाँ जिनमें उच्च परिशुद्धता नियंत्रण की आवश्यकता होती है।
ग्राहकों को "पहले स्टेपर मोटर का चयन करें, फिर मौजूदा स्टेपर मोटर के आधार पर ड्राइवर का चयन करें" के सिद्धांत का पालन करना चाहिए।
हाइब्रिड स्टेपिंग मोटर को चलाने के लिए फुल-स्टेप ड्राइविंग मोड का उपयोग न करना ही बेहतर है, क्योंकि फुल-स्टेप ड्राइविंग के दौरान कंपन अधिक होता है।
हाइब्रिड स्टेपर मोटर कम गति वाले कार्यों के लिए अधिक उपयुक्त है। हम सुझाव देते हैं कि गति 1000 आरपीएम (0.9 डिग्री पर 6666 पीपीएस) से अधिक न हो, बल्कि 1000-3000 पीपीएस (0.9 डिग्री) के बीच हो। गति कम करने के लिए इसमें गियरबॉक्स भी लगाया जा सकता है। उपयुक्त आवृत्ति पर मोटर की कार्यक्षमता उच्च होती है और शोर कम होता है।
ऐतिहासिक कारणों से, केवल 12V के नाममात्र वोल्टेज वाली मोटर ही 12V पर चलती है। डिज़ाइन ड्राइंग में दर्शाए गए अन्य वोल्टेज मोटर के लिए सबसे उपयुक्त ड्राइविंग वोल्टेज नहीं होते हैं। ग्राहकों को अपनी आवश्यकता के अनुसार उपयुक्त ड्राइविंग वोल्टेज और ड्राइवर का चयन करना चाहिए।
जब मोटर को उच्च गति या भारी भार के साथ उपयोग किया जाता है, तो यह आमतौर पर सीधे कार्यशील गति से शुरू नहीं होती है। हम आवृत्ति और गति को धीरे-धीरे बढ़ाने का सुझाव देते हैं। इसके दो कारण हैं: पहला, मोटर में कोई गड़बड़ी नहीं होती है, और दूसरा, इससे शोर कम होता है और स्थिति निर्धारण की सटीकता में सुधार होता है।
मोटर को कंपन क्षेत्र (600 पीपीएस से नीचे) में नहीं चलाना चाहिए। यदि इसे धीमी गति पर चलाना ही है, तो वोल्टेज, करंट में बदलाव करके या कुछ अवमंदन जोड़कर कंपन की समस्या को कम किया जा सकता है।
जब मोटर 600PPS (0.9 डिग्री) से कम गति पर काम करती है, तो इसे कम धारा, उच्च प्रेरकत्व और कम वोल्टेज द्वारा संचालित किया जाना चाहिए।
अधिक जड़त्व आघूर्ण वाले भारों के लिए, बड़े आकार की मोटर का चयन किया जाना चाहिए।
जब अधिक परिशुद्धता की आवश्यकता होती है, तो गियरबॉक्स जोड़कर, मोटर की गति बढ़ाकर या उपविभाजन ड्राइविंग का उपयोग करके इसे हल किया जा सकता है। इसके अलावा, एक 5-फेज मोटर (एकध्रुवीय मोटर) का भी उपयोग किया जा सकता है, लेकिन पूरी प्रणाली की कीमत अपेक्षाकृत अधिक होती है, इसलिए इसका उपयोग कम ही किया जाता है।
स्टेपर मोटर का आकार:
हमारे पास वर्तमान में 20mm (NEMA8), 28mm (NEMA11), 35mm (NEMA14), 42mm (NEMA17), 57mm (NEMA23) और 86mm (NEMA34) हाइब्रिड स्टेपर मोटर उपलब्ध हैं। हाइब्रिड स्टेपर मोटर का चयन करते समय, हमारा सुझाव है कि आप पहले मोटर का आकार निर्धारित करें, फिर अन्य मापदंडों की पुष्टि करें।
अनुकूलन सेवा
मोटर के डिजाइन को ग्राहक की आवश्यकता के अनुसार समायोजित किया जा सकता है, जिसमें निम्नलिखित शामिल हैं:
मोटर का व्यास: हमारे पास 6 मिमी, 8 मिमी, 10 मिमी, 15 मिमी और 20 मिमी व्यास की मोटरें उपलब्ध हैं।
कॉइल प्रतिरोध/रेटेड वोल्टेज: कॉइल प्रतिरोध समायोज्य है, और उच्च प्रतिरोध के साथ, मोटर का रेटेड वोल्टेज भी अधिक होता है।
ब्रैकेट डिजाइन/लीड स्क्रू की लंबाई: यदि ग्राहक ब्रैकेट को लंबा/छोटा करवाना चाहता है, तो माउंटिंग होल जैसे विशेष डिजाइन की मदद से इसे समायोजित किया जा सकता है।
पीसीबी + केबल + कनेक्टर: पीसीबी का डिज़ाइन, केबल की लंबाई और कनेक्टर पिच सभी समायोज्य हैं, ग्राहकों की आवश्यकता होने पर इन्हें एफपीसी से बदला जा सकता है।
समय सीमा
यदि हमारे पास सैंपल स्टॉक में उपलब्ध हैं, तो हम 3 दिनों में सैंपल भेज सकते हैं।
यदि हमारे पास स्टॉक में नमूने नहीं हैं, तो हमें उनका उत्पादन करना होगा, उत्पादन में लगभग 20 कैलेंडर दिन लगते हैं।
बड़े पैमाने पर उत्पादन के लिए, लगने वाला समय ऑर्डर की मात्रा पर निर्भर करता है।
भुगतान विधि और भुगतान शर्तें
सैंपल के लिए, हम आम तौर पर पेपाल या अलीबाबा स्वीकार करते हैं।
बड़े पैमाने पर उत्पादन के लिए, हम टी/टी भुगतान स्वीकार करते हैं।
नमूनों के लिए, हम उत्पादन से पहले पूरा भुगतान प्राप्त करते हैं।
बड़े पैमाने पर उत्पादन के लिए, हम उत्पादन से पहले 50% अग्रिम भुगतान स्वीकार कर सकते हैं, और शेष 50% भुगतान शिपमेंट से पहले प्राप्त कर सकते हैं।
छह से अधिक बार सहयोग करने के बाद, हम भुगतान की अन्य शर्तों जैसे कि ए/एस (आफ्टर साइट) पर बातचीत कर सकते हैं।
अक्सर पूछे जाने वाले प्रश्न
1. नमूनों की सामान्य डिलीवरी का समय कितना है? बैक-एंड के बड़े ऑर्डरों की डिलीवरी का समय कितना है?
सैंपल ऑर्डर की डिलीवरी में लगभग 15 दिन लगते हैं, जबकि बड़ी मात्रा में ऑर्डर की डिलीवरी में 25-30 दिन लगते हैं।
2. क्या आप अनुकूलित सेवाएं स्वीकार करते हैं?
हम मोटर पैरामीटर, लीड वायर का प्रकार, आउट शाफ्ट आदि सहित उत्पादों के अनुकूलन को स्वीकार करते हैं।
3. क्या इस मोटर में एनकोडर जोड़ना संभव है?
इस प्रकार की मोटर के लिए, हम मोटर के बाहरी आवरण पर एनकोडर लगा सकते हैं।
अक्सर पूछा गया सवाल
1. स्टेपर मोटर्स की द्विध्रुवीय और एकध्रुवीय वायरिंग में क्या अंतर है?
द्विध्रुवीय कनेक्शन वाले स्टेपर मोटर्स एक ऐसी ड्राइव विधि का उपयोग करते हैं जिसमें एक ही वाइंडिंग में धारा दोनों दिशाओं में प्रवाहित होती है (द्विध्रुवीय ड्राइव)।
सिंगल-पोल कनेक्शन वाली स्टेपर मोटर में एक सेंट्रल टैप होता है और यह एक ऐसी ड्राइव विधि का उपयोग करती है जिसमें करंट हमेशा एक वाइंडिंग में एक निश्चित दिशा में प्रवाहित होता है (सिंगल-पोल ड्राइव)।
2. स्टार्ट-स्टॉप ऑपरेशन मोड में स्टेपर मोटर चालू न होने के कारण और निवारण विधियाँ
a. लोड बहुत अधिक है: मोटर के चयन में त्रुटि, बड़ी साइज की मोटर चुनें।
b. आवृत्ति बहुत अधिक है: आवृत्ति कम करें
c. यदि मोटर आगे-पीछे दोलन करती है, या टॉर्क बहुत कम है, जो कि फेज क्षति या टूटे हुए सर्किट का संकेत है: मोटर को बदलें या उसकी मरम्मत करें।
d. फेज करंट पर्याप्त नहीं है: कम से कम शुरुआती कुछ चरणों के लिए फेज करंट बढ़ाएँ।
3. स्टेपर मोटर्स में त्वरण पूरा होने के बावजूद स्थिर गति पर पहुंचने पर घूमना बंद हो जाने के कारण और समाधान।
कारण: स्टेपर मोटर अपनी अधिकतम क्षमता पर चल रही है और अत्यधिक त्वरण के कारण रुक जाती है। रोटर कंपन करता है और अस्थिर रूप से चलता है।
समाधान।
① त्वरण कम करें, यानी कम त्वरण चुनें या त्वरण के दो अलग-अलग स्तरों का उपयोग करें, शुरुआत में उच्च और अधिकतम गति के निकट निम्न।
② टॉर्क बढ़ाएँ
③पिछली शाफ्ट में एक मैकेनिकल डैम्पर जोड़ें, लेकिन इससे रोटर की जड़ता बढ़ जाती है।
④ एक उपखंड में गाड़ी चलाकर देखें
हमें अपना संदेश भेजें:
उत्पाद श्रेणियाँ
-
NEMA11 28mm लीनियर हाइब्रिड स्टेपर मोटर नॉन-कैप...
-

28 मिमी आकार का NEMA11 हाइब्रिड स्टेपर मोटर 1.8 डिग्री...
-

उच्च परिशुद्धता 42 मिमी स्टेपर मोटर NEMA 17 हाइब्रिड...
-
20 मिमी NEMA8 लीनियर हाइब्रिड स्टेपर मोटर, रनटाइम के साथ...
-

प्लेनेटरी गियरबॉक्स स्टेपर मोटर 35 मिमी (NEMA 14) ...
-

उच्च टॉर्क वाला NEMA 23 हाइब्रिड स्टेपर मोटर 57 मिमी मीटर...