




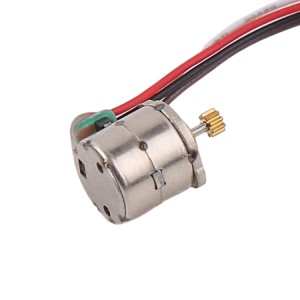
प्रिंटर के लिए हाई टॉर्क माइक्रो 35 मिमी स्टेपर मोटर
विवरण
स्टेपर मोटर्स के लिए वाइंडिंग की दो विधियाँ हैं: द्विध्रुवीय और एकध्रुवीय।
1. द्विध्रुवीय मोटर
हमारे बाइपोलर मोटर्स में आमतौर पर केवल दो फेज होते हैं, फेज A और फेज B, और प्रत्येक फेज में दो आउटपुट तार होते हैं, जो अलग-अलग वाइंडिंग होते हैं। दोनों फेजों के बीच कोई कनेक्शन नहीं होता है। बाइपोलर मोटर्स में 4 आउटपुट तार होते हैं।
2. एकध्रुवीय मोटर
हमारे एकध्रुवीय मोटरों में आमतौर पर चार चरण होते हैं। द्विध्रुवीय मोटरों के दो चरणों के आधार पर, दो सामान्य लाइनें जोड़ी जाती हैं।
यदि सामान्य तारों को आपस में जोड़ा जाए, तो बाहर जाने वाले तारों की संख्या 5 होती है।
यदि सामान्य तारों को आपस में नहीं जोड़ा जाता है, तो बाहर जाने वाले तार 6 तार होते हैं।
एक यूनिपोलर मोटर में 5 या 6 आउटगोइंग लाइनें होती हैं।
पैरामीटर
| वोल्टेज | 8डीवी डीसी |
| चरण की संख्या | 4 चरण |
| स्टेप एंगल | 7.5°±7% |
| घुमाव प्रतिरोध (25℃) | 16Ω±10% |
| वर्तमान चरण | 0.5 एक |
| अवरोधी टॉर्क | ≤110 ग्राम.सेमी |
| अधिकतम प्रवेश दर | 400 पीपीएस |
| होल्डिंग टॉर्क | 450 ग्राम प्रति सेमी |
| वाइंडिंग तापमान | ≤85K |
| डिइलेक्ट्रिक शक्ति | 600 VAC 1 सेकंड 1 mA |
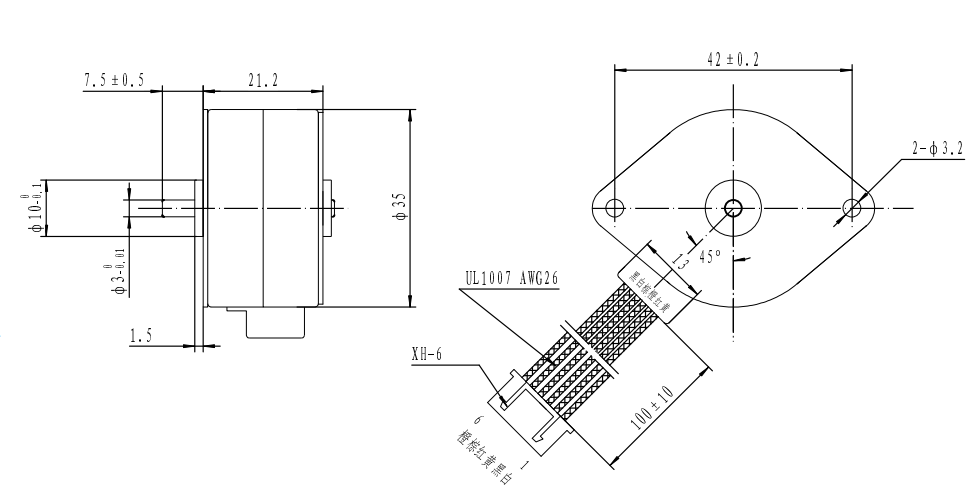
डिज़ाइन आरेखण
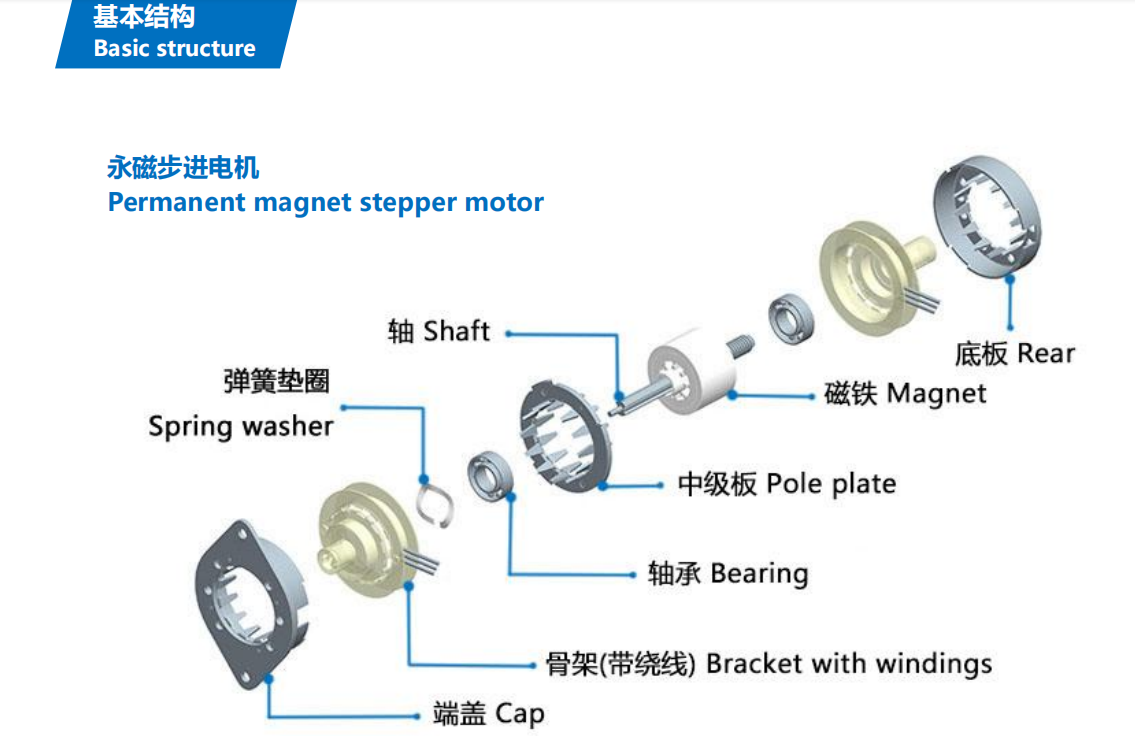
पीएम स्टेपर मोटर की मूल संरचना के बारे में
विशेषताएं और लाभ
1. उच्च परिशुद्धता स्थिति निर्धारण
क्योंकि स्टेपर सटीक और दोहराए जाने योग्य चरणों में चलते हैं, इसलिए वे सटीक अनुप्रयोगों में उत्कृष्ट प्रदर्शन करते हैं।
मोटर द्वारा तय किए गए कदमों की संख्या के आधार पर स्थिति का निर्धारण किया जाता है।
2. उच्च परिशुद्धता गति नियंत्रण
गति के सटीक अंतराल प्रक्रिया के लिए घूर्णी गति पर उत्कृष्ट नियंत्रण की अनुमति देते हैं।
स्वचालन और रोबोटिक्स। घूर्णी गति स्पंदनों की आवृत्ति द्वारा निर्धारित होती है।
3. पॉज़ और होल्ड फ़ंक्शन
ड्राइव के नियंत्रण के साथ, मोटर में लॉक फ़ंक्शन होता है (मोटर वाइंडिंग के माध्यम से करंट प्रवाहित होता है, लेकिन
मोटर घूमती नहीं है), और फिर भी एक होल्डिंग टॉर्क आउटपुट होता है।
4. लंबी आयु और कम विद्युत चुम्बकीय हस्तक्षेप
स्टेपर मोटर में ब्रश नहीं होते हैं, और ब्रश वाले मोटर की तरह इसे ब्रश द्वारा कम्यूटेट करने की आवश्यकता नहीं होती है।
डीसी मोटर। इसमें ब्रशों का घर्षण नहीं होता, जिससे इसकी सेवा अवधि बढ़ जाती है, इसमें विद्युत चिंगारी नहीं निकलती और विद्युत चुम्बकीय हस्तक्षेप कम होता है।
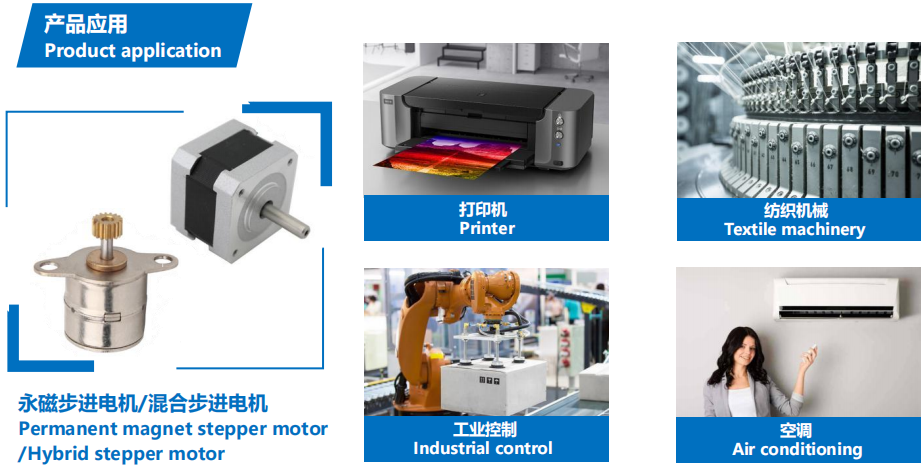
पीएम स्टेपर मोटर का अनुप्रयोग
प्रिंटर
वस्त्र मशीनरी
औद्योगिक नियंत्रण
एयर कंडीशनिंग
स्टेपर मोटर का कार्य सिद्धांत
स्टेपर मोटर का ड्राइव सॉफ्टवेयर द्वारा नियंत्रित होता है। जब मोटर को घूमने की आवश्यकता होती है, तो ड्राइव सक्रिय हो जाता है।
स्टेपर मोटर पल्स लगाएं। ये पल्स एक निर्दिष्ट क्रम में स्टेपर मोटर को सक्रिय करती हैं, जिससे
जिससे मोटर का रोटर एक निर्दिष्ट दिशा (घड़ी की दिशा में या घड़ी की विपरीत दिशा में) घूमने लगे।
मोटर का उचित घूर्णन सुनिश्चित करें। ड्राइवर से पल्स प्राप्त होने पर, मोटर एक निश्चित कोण से घूमेगी (पूर्ण-चरण ड्राइव के साथ), और मोटर का घूर्णन कोण प्राप्त पल्स की संख्या और चरण कोण द्वारा निर्धारित होता है।
डिलीवरी का समय और पैकेजिंग संबंधी जानकारी
नमूनों के लिए अपेक्षित समय:
स्टॉक में उपलब्ध मानक मोटरें: 3 दिनों के भीतर
मानक मोटरें स्टॉक में नहीं हैं: 15 दिनों के भीतर उपलब्ध होंगी
अनुकूलित उत्पाद: लगभग 25-30 दिन (अनुकूलन की जटिलता के आधार पर)
नया सांचा बनाने में लगने वाला समय: आमतौर पर लगभग 45 दिन
बड़े पैमाने पर उत्पादन के लिए लगने वाला समय: ऑर्डर की मात्रा पर आधारित
पैकेजिंग:
नमूनों को फोम स्पंज में पैक करके पेपर बॉक्स में रखा जाता है और एक्सप्रेस डिलीवरी द्वारा भेजा जाता है।
बड़े पैमाने पर उत्पादन के दौरान, मोटरों को बाहर से पारदर्शी फिल्म से ढके नालीदार डिब्बों में पैक किया जाता है। (हवाई मार्ग से शिपिंग)
यदि उत्पाद को समुद्री मार्ग से भेजा जाता है, तो उसे पैलेट पर पैक किया जाएगा।

भुगतान विधि और भुगतान शर्तें
सैंपल के लिए, हम आम तौर पर पेपाल या अलीबाबा स्वीकार करते हैं।
बड़े पैमाने पर उत्पादन के लिए, हम टी/टी भुगतान स्वीकार करते हैं।
नमूनों के लिए, हम उत्पादन से पहले पूरा भुगतान प्राप्त करते हैं।
बड़े पैमाने पर उत्पादन के लिए, हम उत्पादन से पहले 50% अग्रिम भुगतान स्वीकार कर सकते हैं, और शेष 50% भुगतान शिपमेंट से पहले प्राप्त कर सकते हैं।
छह से अधिक बार सहयोग करने के बाद, हम भुगतान की अन्य शर्तों जैसे कि ए/एस (आफ्टर साइट) पर बातचीत कर सकते हैं।
हमें अपना संदेश भेजें:
उत्पाद श्रेणियाँ
-

20 मिमी माइक्रो स्टेपर मोटर को जी के साथ जोड़ा जा सकता है...
-

15 बाई माइक्रो स्टेपर मोटर 2-फेज 4-वायर 18 डिग्री...
-

कम शोर वाला उच्च गुणवत्ता वाला 3.3V 6mm माइक्रो स्टेपर मोटर...
-
8 मिमी मिनी माइक्रो स्टेपर मोटर 2 फेज 18 डिग्री ...
-

10BY मिनी 5v 10mm व्यास वाला माइक्रो स्टेपर मोटर...
-

20 मिमी स्थायी चुंबक 12V माइक्रो स्टेपर मोटर...