.jpg)
.jpg)
.jpg)
.jpg)
नेमा 23 (57 मिमी) हाइब्रिड स्टेपर मोटर, बाइपोलर, 4-लीड, एसीएमई लीड स्क्रू, कम शोर, लंबी आयु, उच्च प्रदर्शन।
नेमा 23 (57 मिमी) हाइब्रिड स्टेपर मोटर, बाइपोलर, 4-लीड, एसीएमई लीड स्क्रू, कम शोर, लंबी आयु, उच्च प्रदर्शन।
यह 57 मिमी हाइब्रिड स्टेपर मोटर तीन प्रकारों में उपलब्ध है: बाह्य रूप से संचालित, अक्ष-आधारित और स्थिर अक्ष-आधारित। आप अपनी विशिष्ट आवश्यकताओं के अनुसार चयन कर सकते हैं।
यह मोटर 20 मिमी, 28 मिमी, 35 मिमी, 42 मिमी, 57 मिमी और 86 मिमी साइज में उपलब्ध है।
स्टेप की लंबाई, 0.001524 मिमी~0.127 मिमी
प्रदर्शन: अधिकतम थ्रस्ट 240 किलोग्राम तक, कम तापमान वृद्धि, कम कंपन, कम शोर, लंबी आयु (5 मिलियन चक्रों तक), उच्च स्थिति निर्धारण सटीकता (±0.01 मिमी तक)
विवरण
| प्रोडक्ट का नाम | 57 मिमी हाइब्रिड स्टेपर मोटर्स |
| नमूना | वीएसएम57एचएसएम |
| प्रकार | हाइब्रिड स्टेपर मोटर्स |
| स्टेप एंगल | 1.8° |
| वोल्टेज (V) | 2.3 / 3 / 3.1 / 3.8 |
| धारा (ए) | 3/4 |
| प्रतिरोध (ओहम) | 0.75 / 1 / 0.78 / 0.95 |
| प्रेरकत्व (mH) | 2.5 / 4.5 / 3.3 / 4.5 |
| सीसा तार | 4 |
| मोटर की लंबाई (मिमी) | 45 / 55 / 65 / 75 |
| परिवेश का तापमान | -20℃ ~ +50℃ |
| तापमान वृद्धि | 80,000 अधिकतम। |
| ढांकता हुआ ताकत | 1mA अधिकतम @ 500V, 1KHz, 1सेकंड। |
| इन्सुलेशन प्रतिरोध | 100MΩ न्यूनतम @500Vdc |
प्रमाणपत्र

विद्युतीय मापदंड:
| मोटर का आकार | वोल्टेज /चरण (V) | मौजूदा /चरण (ए) | प्रतिरोध /चरण (Ω) | अधिष्ठापन /चरण (एमएच) | की संख्या सीसा तार | रोटर जड़त्व (जी.सेमी.2) | मोटर का वजन (जी) | मोटर की लंबाई L (मिमी) |
| 57 | 2.3 | 3 | 0.75 | 2.5 | 4 | 150 | 580 | 45 |
| 57 | 3 | 3 | 1 | 4.5 | 4 | 300 | 710 | 55 |
| 57 | 3.1 | 4 | 0.78 | 3.3 | 4 | 400 | 880 | 65 |
| 57 | 3.8 | 4 | 0.95 | 4.5 | 4 | 480 | 950 | 75 |
लीड स्क्रू की विशिष्टताएँ और प्रदर्शन पैरामीटर
| व्यास (मिमी) | नेतृत्व करना (मिमी) | कदम (मिमी) | पावर ऑफ सेल्फ-लॉकिंग फोर्स (एन) |
| 9.525 | 1.27 | 0.00635 | 800 |
| 9.525 | 2.54 | 0.0127 | 300 |
| 9.525 | 5.08 | 0.0254 | 90 |
| 9.525 | 10.16 | 0.0508 | 30 |
| 9.525 | 25.4 | 0.127 | 6 |
नोट: लीड स्क्रू की अन्य विशिष्टताओं के लिए, कृपया हमसे संपर्क करें।
VSM57HSM मानक बाह्य मोटर का रूपरेखा चित्र:
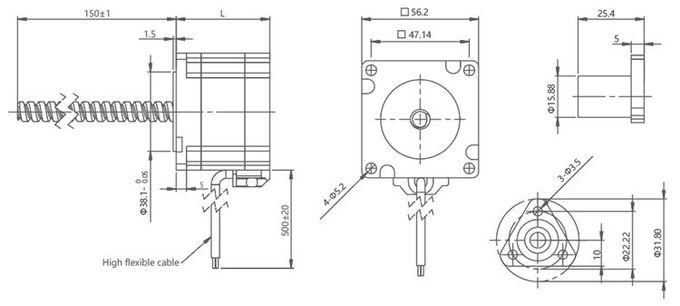
टिप्पणियाँ:
लीड स्क्रू की लंबाई को आवश्यकतानुसार अनुकूलित किया जा सकता है।
लीड स्क्रू के सिरे पर अनुकूलित मशीनिंग संभव है
57 मिमी हाइब्रिड स्टेपर मोटर्स के मानक कैप्टिव मोटर का रूपरेखा चित्र:
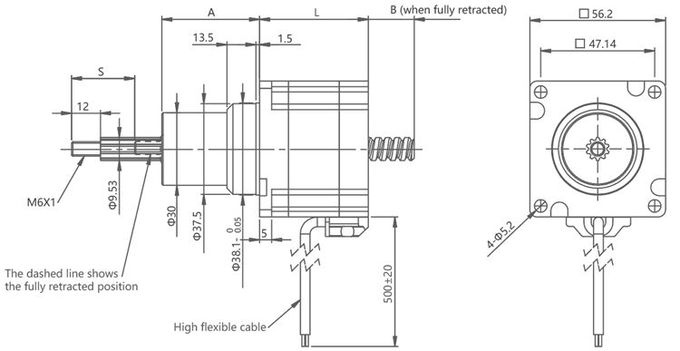
टिप्पणियाँ:
लीड स्क्रू के सिरे पर अनुकूलित मशीनिंग संभव है
| स्ट्रोक एस (मिमी) | आयाम ए (मिमी) | आयाम B (मिमी) | |||
| एल = 45 | एल = 55 | एल = 65 | एल = 75 | ||
| 12.7 | 24.1 | 1.1 | 0 | 0 | 0 |
| 19.1 | 30.5 | 7.5 | 0 | 0 | 0 |
| 25.4 | 36.8 | 13.8 | 4.8 | 0 | 0 |
| 31.8 | 43.2 | 20.2 | 11.2 | 0.2 | 0 |
| 38.1 | 49.5 | 26.5 | 17.5 | 6.5 | 0 |
| 50.8 | 62.2 | 39.2 | 30.2 | 19.2 | 9.1 |
| 63.5 | 74.9 | 51.9 | 42.9 | 31.9 | 21.9 |
57 मिमी हाइब्रिड स्टेपर मोटर स्टैंडर्ड थ्रू-फिक्स्ड मोटर का आउटलाइन चित्र
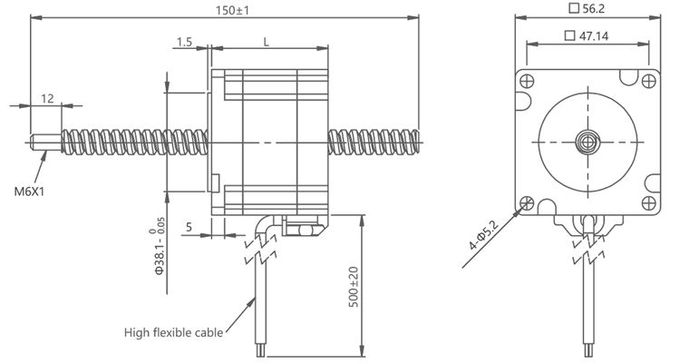
टिप्पणियाँ:
लीड स्क्रू की लंबाई को आवश्यकतानुसार अनुकूलित किया जा सकता है।
लीड स्क्रू के सिरे पर अनुकूलित मशीनिंग संभव है
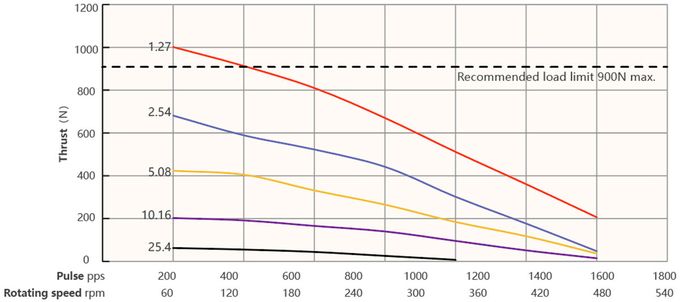
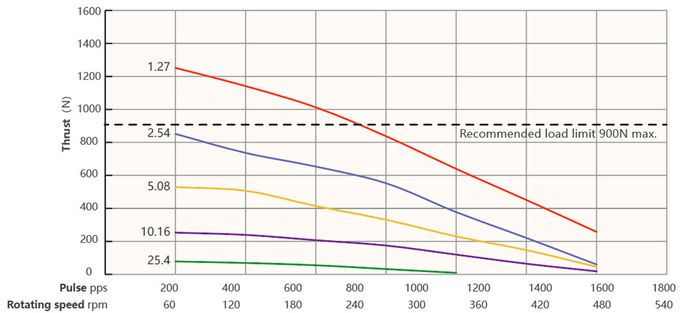
गति और थ्रस्ट वक्र:
57 सीरीज 45 मिमी मोटर लंबाई वाला बाइपोलर चॉपर ड्राइव
100% वर्तमान पल्स आवृत्ति और थ्रस्ट वक्र (Φ9.525 मिमी लीड स्क्रू)
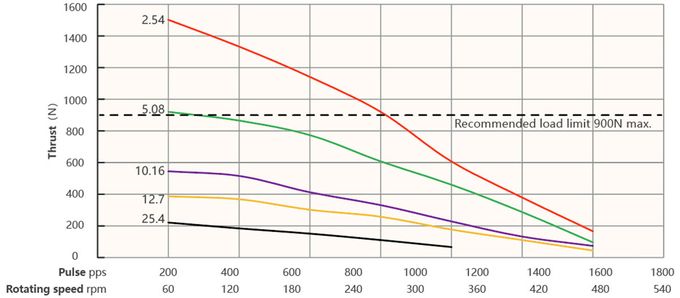
57 सीरीज 55 मिमी मोटर लंबाई बाइपोलर चॉपर ड्राइव
100% वर्तमान पल्स आवृत्ति और थ्रस्ट वक्र (Φ9.525 मिमी लीड स्क्रू)
| सीसा (मिमी) | रेखीय वेग (मिमी/सेकंड) | ||||||||
| 1.27 | 1.27 | 2.54 | 3.81 | 5.08 | 6.35 | 7.62 | 8.89 | 10.16 | 11.43 |
| 2.54 | 2.54 | 5.08 | 7.62 | 10.16 | 12.7 | 15.24 | 17.78 | 20.32 | 22.86 |
| 5.08 | 5.08 | 10.16 | 15.24 | 20.32 | 25.4 | 30.48 | 35.56 | 40.64 | 45.72 |
| 10.16 | 10.16 | 20.32 | 30.48 | 40.64 | 50.8 | 60.96 | 71.12 | 81.28 | 91.44 |
| 25.4 | 25.4 | 50.8 | 76.2 | 101.6 | 127 | 152.4 | 711.8 | 203.2 | 228.6 |
परीक्षण की स्थिति:
चॉपर ड्राइव, रैंपिंग नहीं, हाफ माइक्रो-स्टेपिंग, ड्राइव वोल्टेज 40V
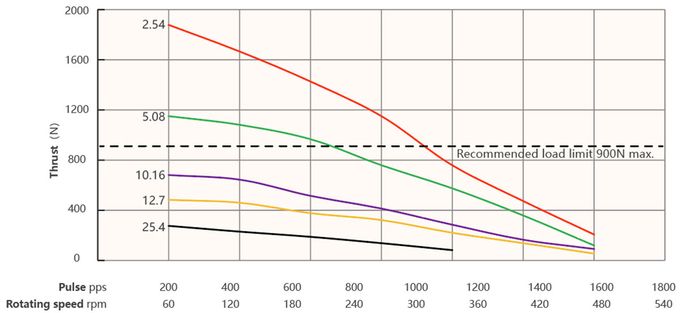
57 सीरीज 65 मिमी मोटर लंबाई बाइपोलर चॉपर ड्राइव
100% वर्तमान पल्स आवृत्ति और थ्रस्ट वक्र (Φ9.525 मिमी लीड स्क्रू)
57 सीरीज 75 मिमी मोटर लंबाई बाइपोलर चॉपर ड्राइव
100% वर्तमान पल्स आवृत्ति और थ्रस्ट वक्र (Φ9.525 मिमी लीड स्क्रू)
| सीसा (मिमी) | रेखीय वेग (मिमी/सेकंड) | ||||||||
| 1.27 | 1.27 | 2.54 | 3.81 | 5.08 | 6.35 | 7.62 | 8.89 | 10.16 | 11.43 |
| 2.54 | 2.54 | 5.08 | 7.62 | 10.16 | 12.7 | 15.24 | 17.78 | 20.32 | 22.86 |
| 5.08 | 5.08 | 10.16 | 15.24 | 20.32 | 25.4 | 30.48 | 35.56 | 40.64 | 45.72 |
| 10.16 | 10.16 | 20.32 | 30.48 | 40.64 | 50.8 | 60.96 | 71.12 | 81.28 | 91.44 |
| 25.4 | 25.4 | 50.8 | 76.2 | 101.6 | 127 | 152.4 | 711.8 | 203.2 | 228.6 |
परीक्षण की स्थिति:
चॉपर ड्राइव, रैंपिंग नहीं, हाफ माइक्रो-स्टेपिंग, ड्राइव वोल्टेज 40V
अनुप्रयोग के क्षेत्र
3डी प्रिंटिंग:57 मिमी हाइब्रिड स्टेपर मोटर्स का उपयोग 3डी प्रिंटर में प्रिंट हेड की स्थिति और गति को नियंत्रित करने के लिए व्यापक रूप से किया जाता है।
सीएनसी मशीन टूल्स:कंप्यूटर न्यूमेरिकल कंट्रोल (सीएनसी) मशीन टूल्स में, सटीक मशीनिंग कार्यों के लिए कटिंग टूल्स की गति को नियंत्रित करने के लिए 57 मिमी हाइब्रिड स्टेपर मोटर्स का उपयोग किया जाता है।
स्वचालन उपकरण:57 मिमी हाइब्रिड स्टेपर मोटर्स का उपयोग विभिन्न प्रकार के स्वचालन उपकरणों में किया जा सकता है, जैसे कि स्वचालित पैकेजिंग मशीनें, स्वचालित छँटाई प्रणाली, स्वचालित असेंबली लाइनें आदि, गति और स्थिति को नियंत्रित करने के लिए।
वस्त्र निर्माण मशीनरी:वस्त्र उद्योग में, कताई मशीनों, करघों और अन्य उपकरणों को नियंत्रित करने के लिए 57 मिमी हाइब्रिड स्टेपर मोटर्स का उपयोग किया जा सकता है ताकि वस्त्र निर्माण प्रक्रिया की सटीकता और स्थिरता सुनिश्चित हो सके।
चिकित्सकीय संसाधन:57 मिमी हाइब्रिड स्टेपर मोटर्स का उपयोग चिकित्सा उपकरणों जैसे कि मेडिकल सिरिंज पंप, मेडिकल रोबोट, इमेज स्कैनिंग उपकरण आदि में सटीक स्थिति नियंत्रण और गति नियंत्रण के लिए व्यापक रूप से किया जाता है।
रोबोटिक्स:57 मिमी हाइब्रिड स्टेपर मोटर्स का उपयोग औद्योगिक रोबोट, सर्विस रोबोट, सहयोगी रोबोट आदि सहित विभिन्न प्रकार के रोबोटिक्स अनुप्रयोगों में सटीक गति और हेरफेर के लिए किया जाता है।
स्वचालित भंडारण प्रणाली:स्वचालित भंडारण और लॉजिस्टिक्स प्रणालियों में, 57 मिमी हाइब्रिड स्टेपर मोटर्स का उपयोग कन्वेयर बेल्ट, लिफ्ट, स्टेकर क्रेन और अन्य उपकरणों को नियंत्रित करने के लिए किया जा सकता है ताकि वस्तुओं की सटीक स्थिति और हैंडलिंग प्राप्त की जा सके।
ये 57 मिमी हाइब्रिड स्टेपर मोटर्स के कुछ विशिष्ट अनुप्रयोग मात्र हैं, और वास्तव में, इनका व्यापक रूप से कई अन्य क्षेत्रों में उपयोग किया जाता है, जिनमें प्रिंटिंग उपकरण, सुरक्षा प्रणाली, सटीक उपकरण आदि शामिल हैं।
फ़ायदा
उच्च टॉर्क-से-आकार अनुपात:अपने छोटे आकार के बावजूद, 57 मिमी हाइब्रिड स्टेपर मोटर उच्च टॉर्क आउटपुट प्रदान कर सकती हैं। यह उन्हें उन अनुप्रयोगों के लिए उपयुक्त बनाता है जहां स्थान सीमित है, लेकिन उच्च टॉर्क की आवश्यकता होती है।
ओपन-लूप नियंत्रण:हाइब्रिड स्टेपर मोटर्स ओपन-लूप कंट्रोल सिस्टम में काम कर सकती हैं, जिसका अर्थ है कि उन्हें एनकोडर जैसे पोजीशन फीडबैक डिवाइस की आवश्यकता नहीं होती है। इससे कंट्रोल सिस्टम सरल हो जाता है और कुल लागत कम हो जाती है।
सटीक स्थिति निर्धारण:हाइब्रिड स्टेपर मोटर्स अपनी अंतर्निहित स्टेप रिज़ॉल्यूशन के कारण सटीक स्थिति निर्धारण क्षमता प्रदान करती हैं। ये छोटे-छोटे चरणों में गति कर सकती हैं, जिससे सटीक स्थिति निर्धारण और दोहराव संभव हो पाता है।
सुचारू संचालन:हाइब्रिड स्टेपर मोटरें सुचारू संचालन प्रदान कर सकती हैं, विशेष रूप से माइक्रोस्टेपिंग तकनीक से संचालित होने पर। माइक्रोस्टेपिंग प्रत्येक चरण को छोटे उप-चरणों में विभाजित करती है, जिसके परिणामस्वरूप गति अधिक सुगम होती है और कंपन कम होता है।
त्वरित प्रतिक्रिया समय:हाइब्रिड स्टेपर मोटर्स की प्रतिक्रिया गति तीव्र होती है, जिससे तीव्र त्वरण और मंदी संभव हो पाती है। यह विशेषता गतिशील और फुर्तीली गतिविधियों की आवश्यकता वाले अनुप्रयोगों के लिए लाभकारी है।
उच्च विश्वसनीयता और स्थायित्व:हाइब्रिड स्टेपर मोटर्स अपनी मजबूती और विश्वसनीयता के लिए जानी जाती हैं। इनका परिचालन जीवन लंबा होता है, रखरखाव की आवश्यकता कम होती है और ये कठिन परिचालन स्थितियों का सामना कर सकती हैं।
किफायती समाधान:सर्वो मोटर्स जैसी अन्य गति नियंत्रण तकनीकों की तुलना में, हाइब्रिड स्टेपर मोटर्स आमतौर पर अधिक किफायती समाधान प्रदान करती हैं। ये प्रदर्शन और किफायती कीमत के बीच अच्छा संतुलन बनाए रखती हैं।
आसान एकीकरण:हाइब्रिड स्टेपर मोटर व्यापक रूप से उपलब्ध हैं और विभिन्न ड्राइव इलेक्ट्रॉनिक्स और नियंत्रण प्रणालियों के साथ संगत हैं। इन्हें विभिन्न प्रकार की मशीनरी और स्वचालन सेटअप में आसानी से एकीकृत किया जा सकता है।
ऊर्जा दक्षता:हाइब्रिड स्टेपर मोटरें केवल गतिमान होने पर ही बिजली की खपत करती हैं, जिससे वे ऊर्जा-कुशल बन जाती हैं। स्थिर रहने पर उन्हें निरंतर बिजली की आवश्यकता नहीं होती है, जिससे कुल ऊर्जा बचत में योगदान होता है।
मोटर चयन संबंधी आवश्यकताएँ:
►गति/चढ़ने की दिशा
►लोड आवश्यकताएँ
►स्ट्रोक संबंधी आवश्यकताएँ
►अंतिम मशीनिंग आवश्यकताएँ
► परिशुद्धता आवश्यकताएँ
►एनकोडर फीडबैक आवश्यकताएँ
►मैन्युअल समायोजन आवश्यकताएँ
►पर्यावरणीय आवश्यकताएँ
उत्पादन कार्यशाला


-300x300.jpg)
-300x300.jpg)
-300x300.jpg)
-300x300.jpg)
-300x300.jpg)